Position Feedback System for ARTMS
Overview
Designed a distributed sensor checkpoint system for the ARTMS QIS Ecosystem to provide real-time positional feedback of radioactive capsules traveling inside a sealed pneumatic transfer hose within a radiation-constrained environment.
ARTMS builds technology that helps manufacture medical radioactive isotopes using cyclotrons (particle accelerators). Their process involves moving small radioactive capsules through a pneumatic transfer hose between station and cyclotron as shown in the figure below.
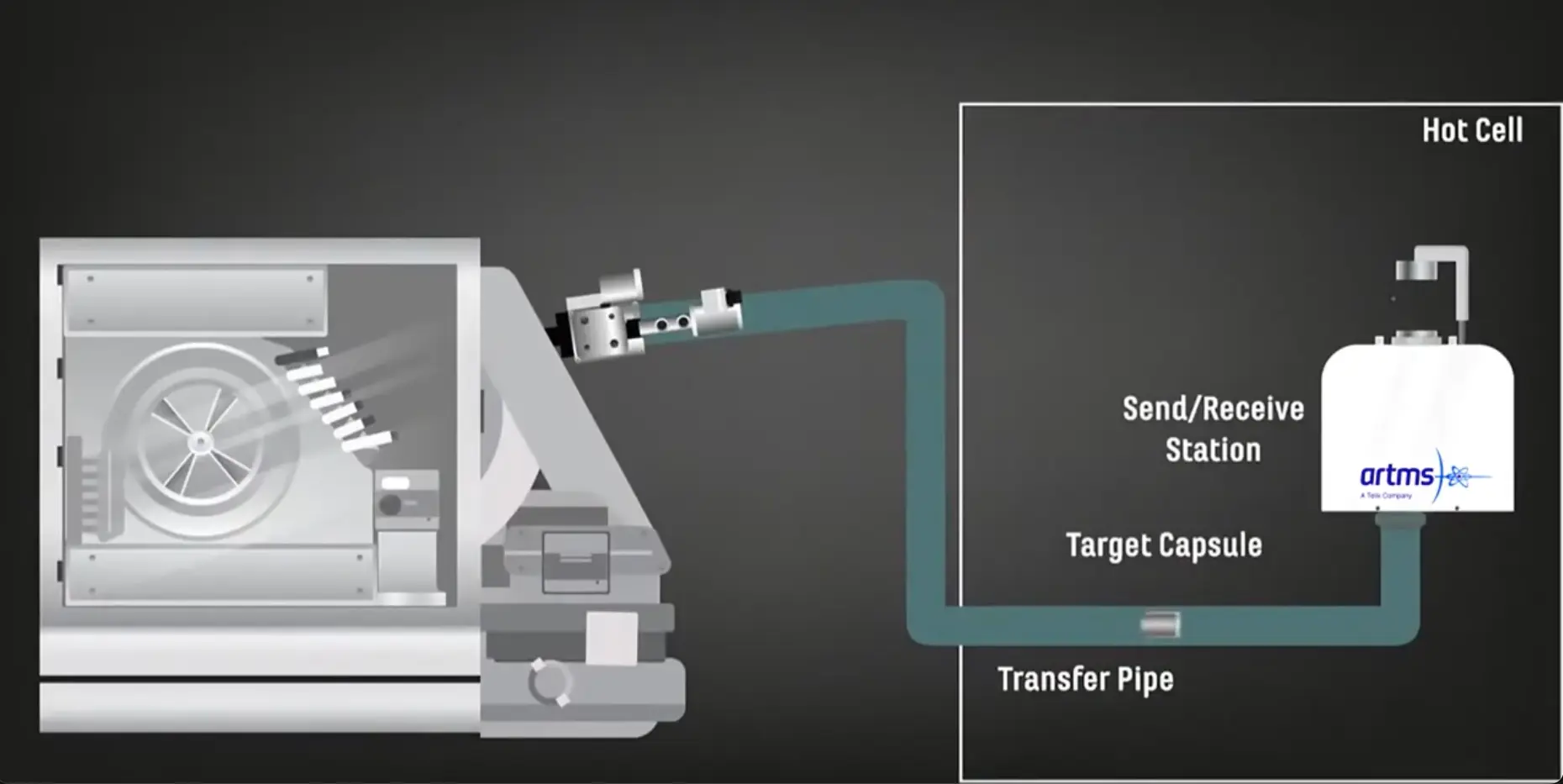
ARTMS QIS Ecosystem, a cyclotron-based system that produces medical radioactive isotopes.
Problem
- ARTMS relies on shielded pneumatic transport lines to move radioactive capsules between stations. In sporadic failure cases, capsules get stuck inside the transfer hose.
- The environment prevents visual inspection, making the capsule's exact position unknown. This lack of visibility leads to production delays, inefficient troubleshooting, and reduced system throughput.
Our Solution
We designed a sensor checkpoint system to provide real-time position feedback of the capsule inside the hose. Each checkpoint consists of a PCB with various sensors to detect the passing of the capsule. The PCBs are mounted externally along the hose at discrete checkpoints, relaying information to the main board (connected to the client's HMI to provide real-time feedback of the capsule's position).
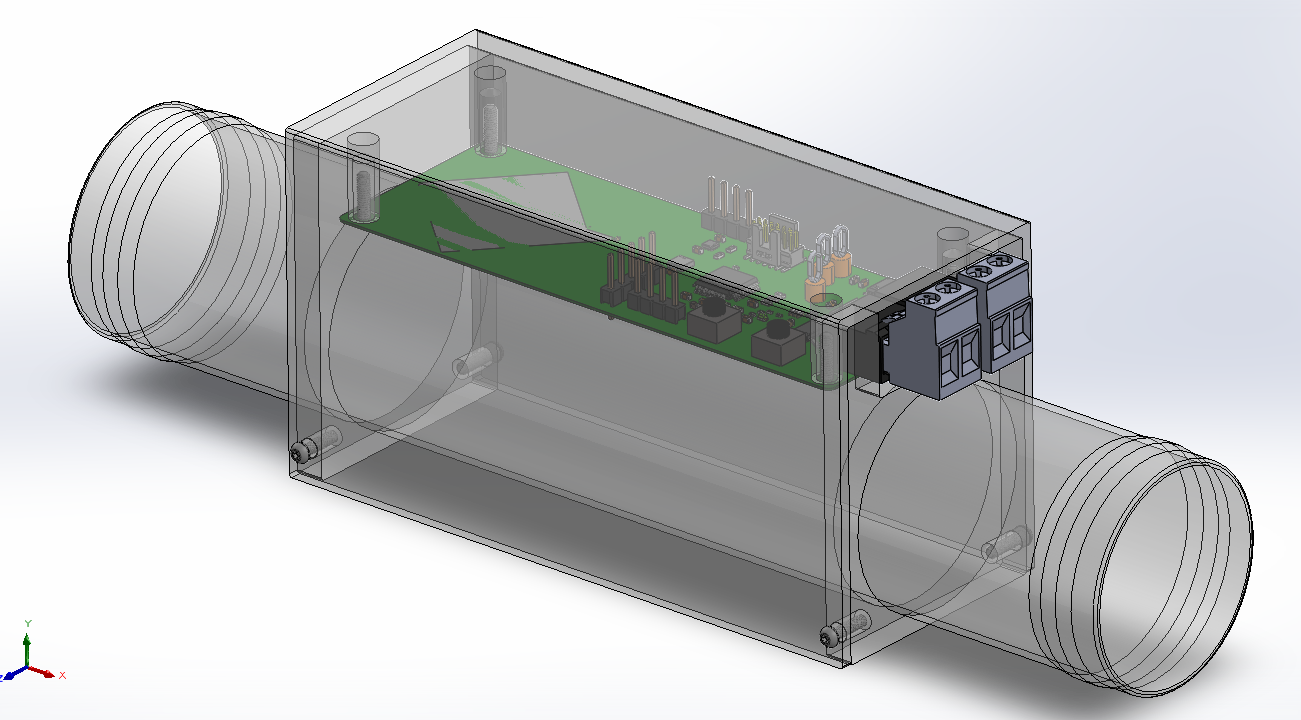
Assembly of the Sensor PCB mounted in the mechanical enclosure.
My Contributions
I was responsible for, and took full ownership of firmware and PCB design of the Sensor PCB. I designed it from the ground up, from brainstoring the architecture to board bring-up. The system architecture I designed is distributed with multiple sensor PCBs along the hose, communicating with the main board to provide real-time capsule position feedback.

System Architecture
Three distinct sensors: inductive, inertial, and optical based were integrated to detect a different physical property of the moving capsule, providing redundancy and improving reliability. On each Sensor PCB, the sensors communicate with the microcontroller unit (MCU). I chose CAN (Controller Area Network) as the communication backbone along the hose due to its robustness in noisy industrial environments.
A labelled 3D render of the Sensor PCB is shown in the figure below.
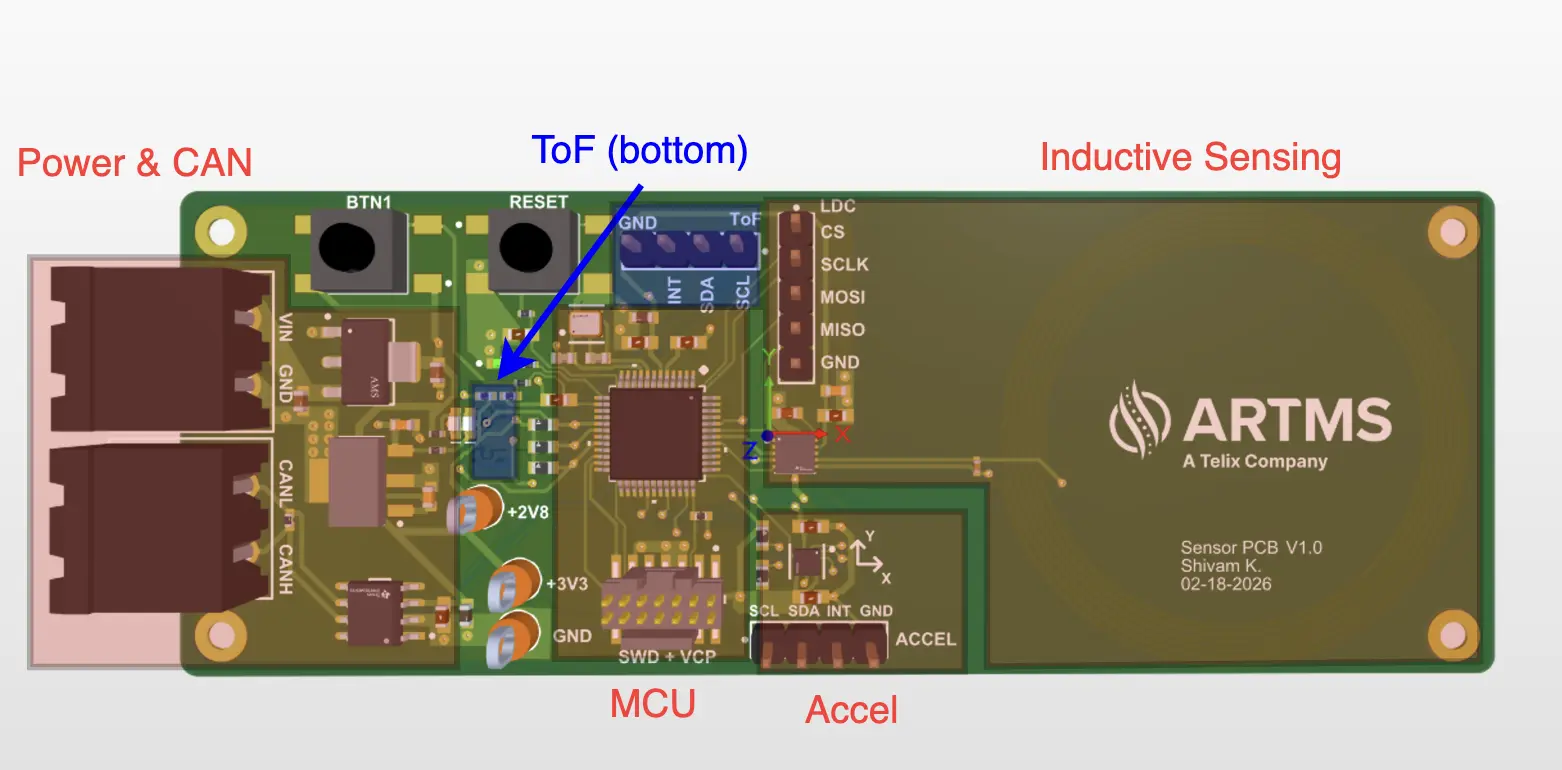
Labelled 3D render of the Sensor PCB showing key components.
Testing & Validation
We thoroughly tested the system in a transfer hose test rig to validate the design and successful capsule detection across different scenarios. The plot below shows one test run. Figure below shows that the checkpoint correctly detected the capsule passing through, visible as a spike in both the accelerometer and Time-of-Flight (ToF) sensor readings.
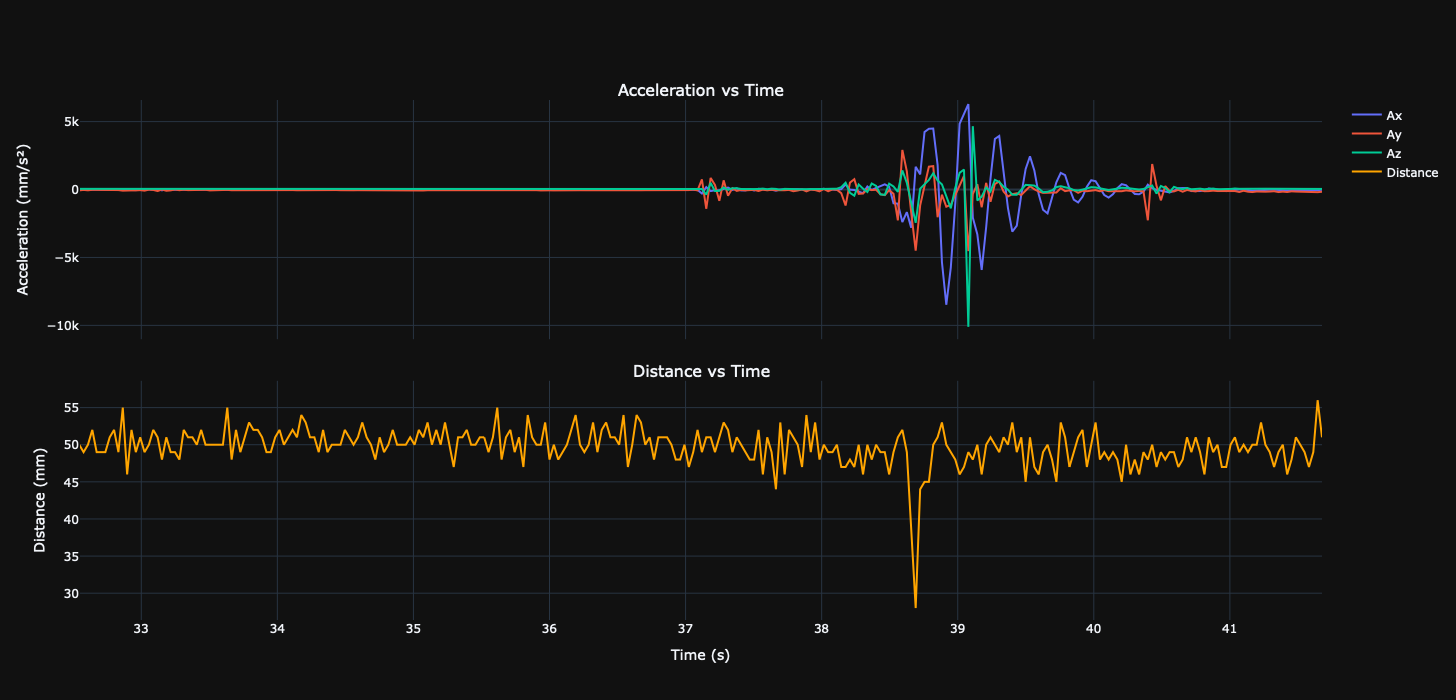
Accelerometer and ToF sensor output during a capsule transfer test, confirming successful detection.
Impact
By giving ARTMS real-time visibility of capsule position for the first time, this system directly reduces production downtime and speeds up troubleshooting when failures occur. A direct consequence is increasing the availability of medical isotopes for patients in need, supporting ARTMS's mission of enhancing human health through reliable isotope production.
Technical Details
The PCB was designed as a 2-layer board. For a future iteration, a 4-layer board would be preferable to provide an uninterrupted ground plane, improving signal integrity and reducing the number of vias. Another consideration for future iterations is to use a single compact connector (such as an Ethernet port) to carry both power and CAN lines, saving board space.
PCB layout and schematics are shown in figures below, designed using Altium.
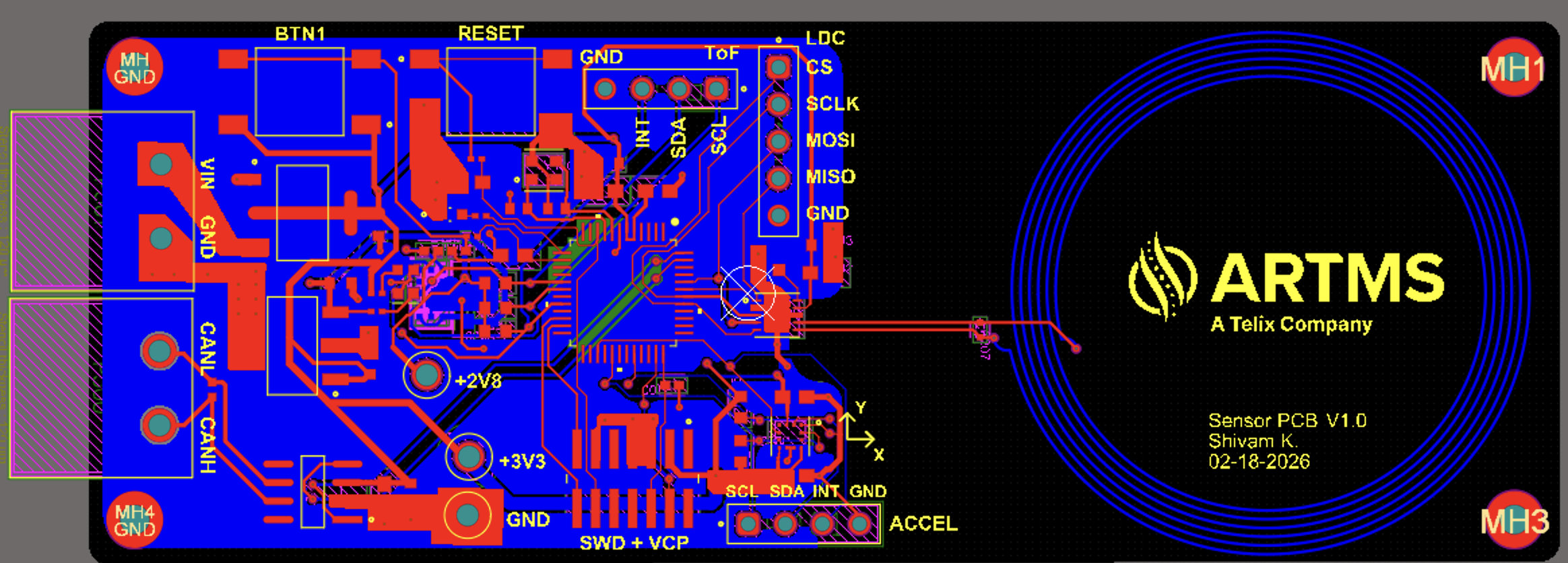
Final PCB layout in Altium Designer. Component placement and routing were optimized for the physical size constraints.
Full sensor PCB schematic (ommited part is test points and debug pins page)